undergraduate
my work
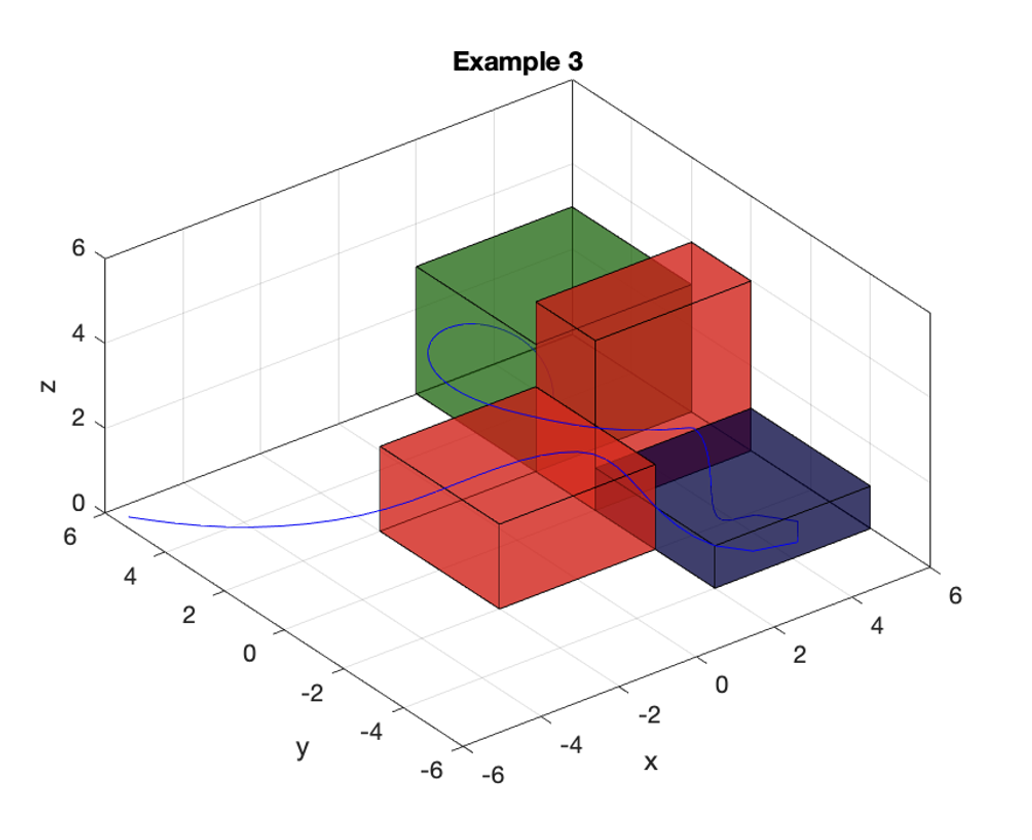
I analyzed a hypothetical Urban Air Mobility case where a drone's operation is dictated using spatio-temporal logic. This image shows geofenced areas that describe acceptable and unacceptable states for the vehicle.
The following framework is aplpied in the MATLAB/Simulink Simulation to model the drone subject to physical constraints and the applied spatio-temporal logic objectives.
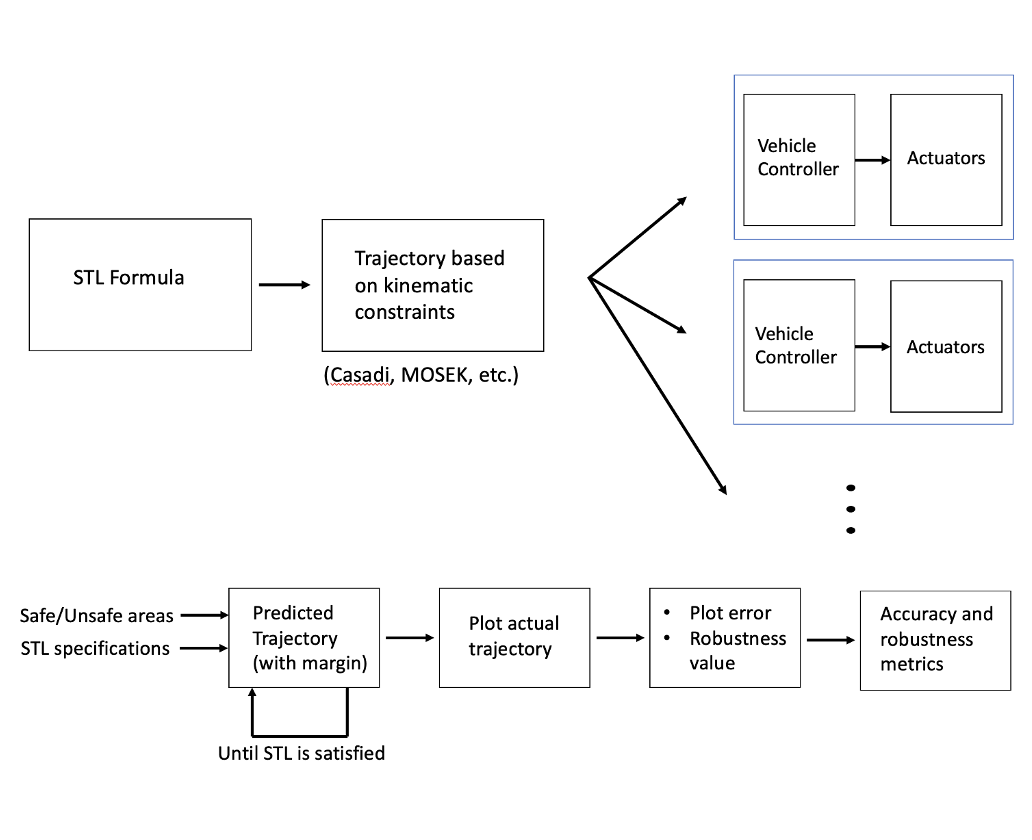
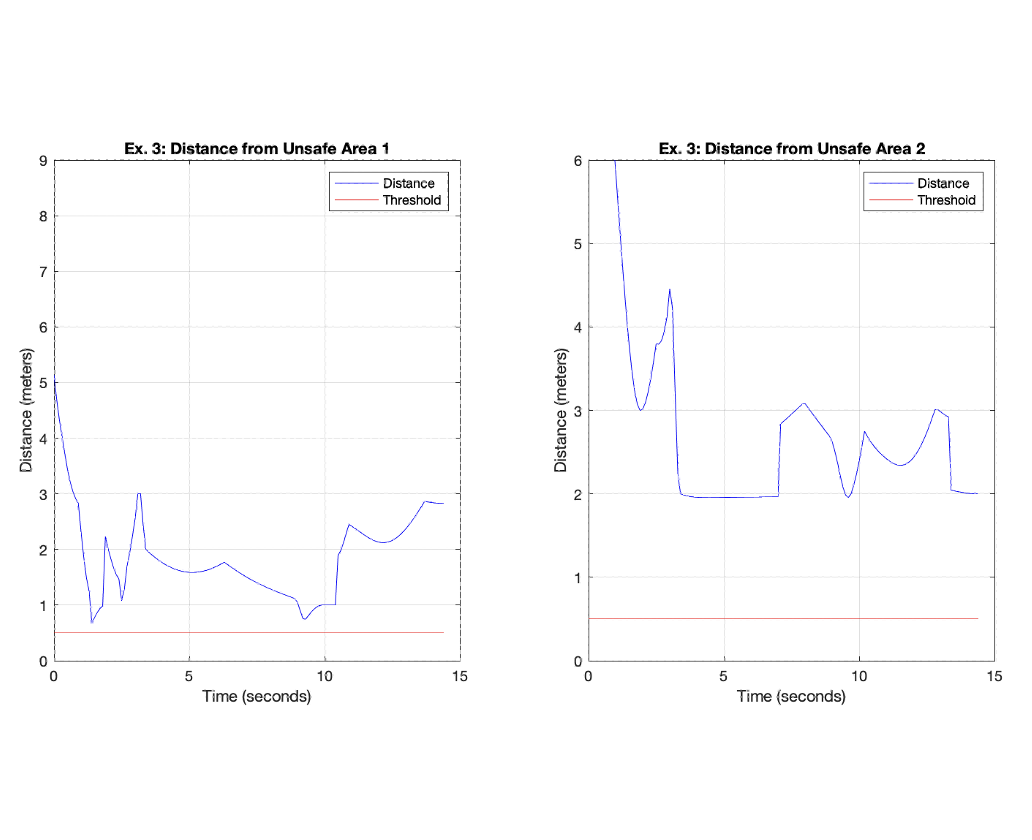
The distance from an "unsafe" area is quantified and used as feedback for the controller over successive runs.
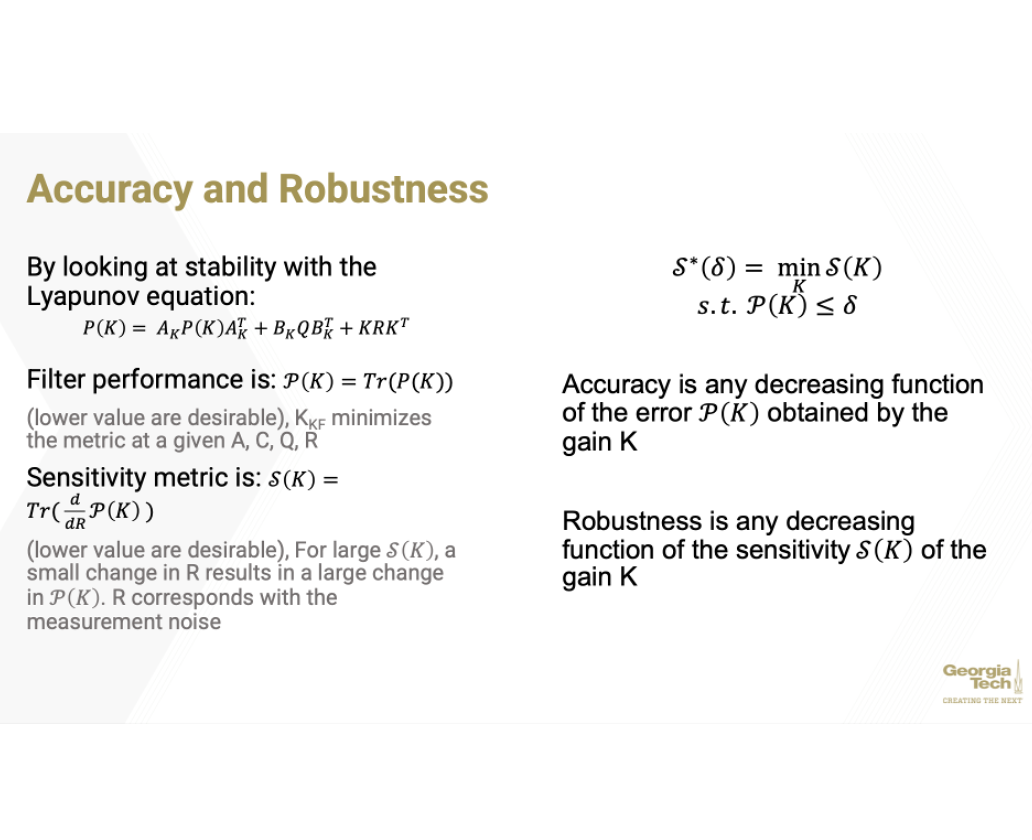
A fundamental tradeoff is shown between accuracy and robustness for a given filter. Such properties can be defined, but are inherently traded off in deep learning systems.