stanford graduate
my work
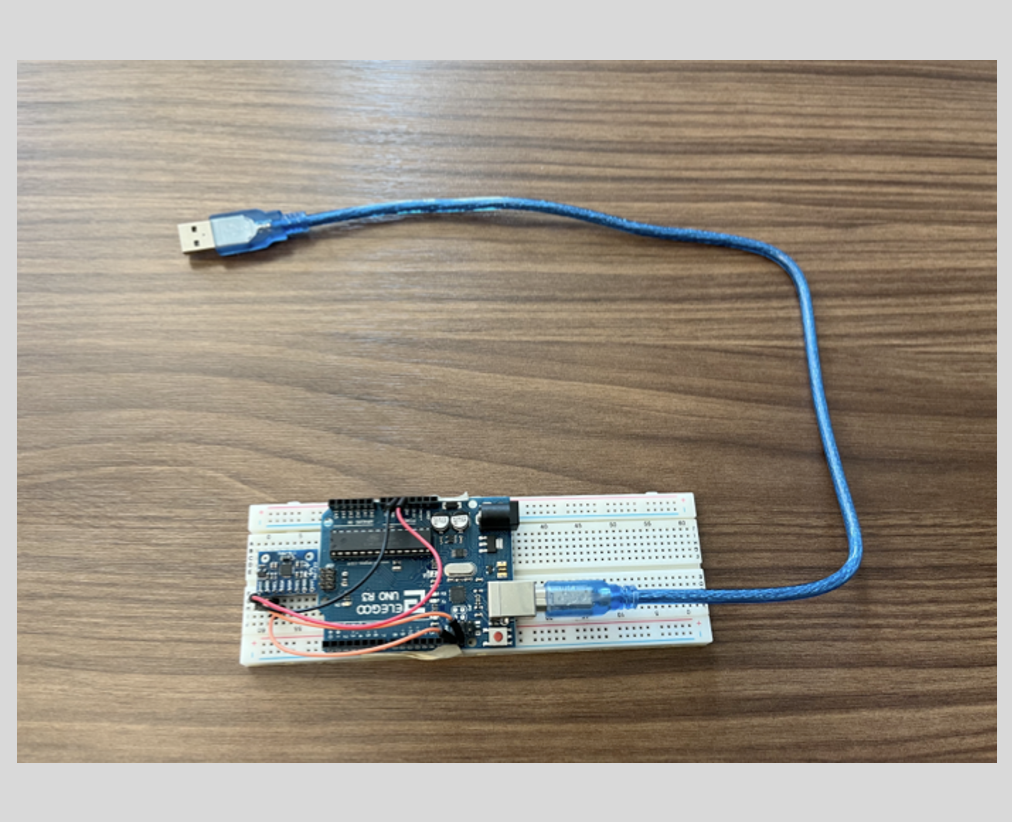
Our test apparatus consisted of an off-the-shelf IMU with an Arduino Uno.
Characterization of the IMU in a nominal, stationary configuration is required. The corresponding Allen variance plots are included from the IMU characterization tests.

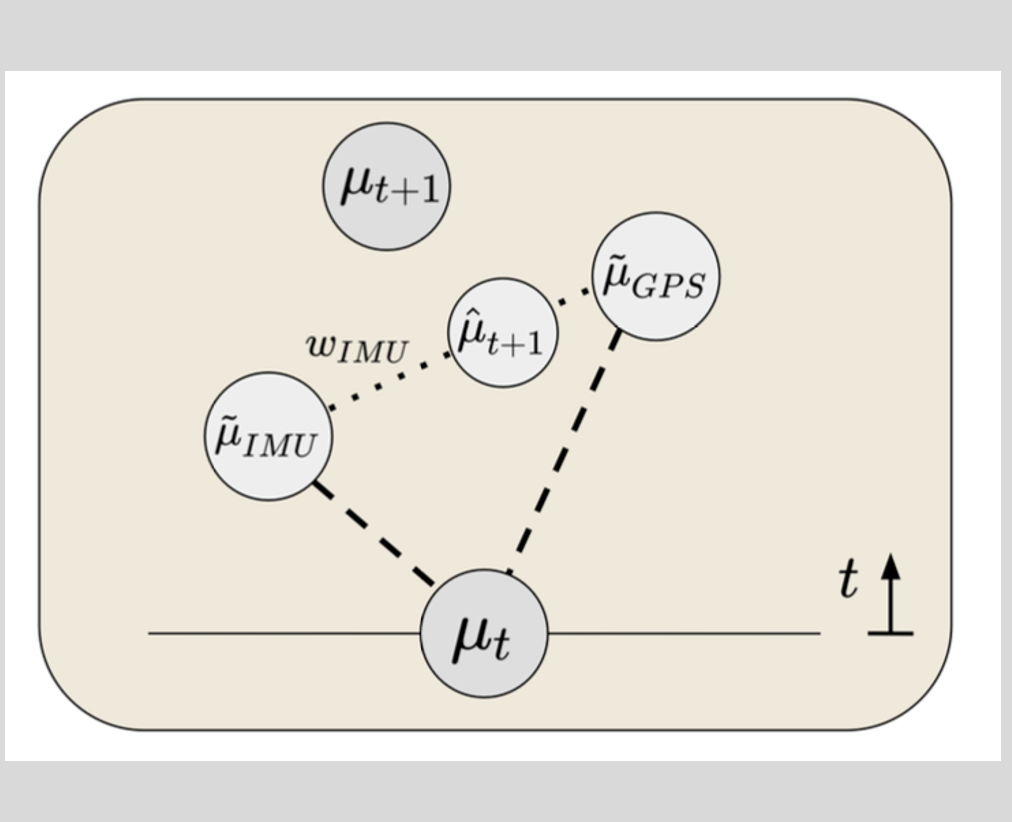
This illustration describes how the complementary filter uses a weighted average of measurements to predict a future state from a previous state.
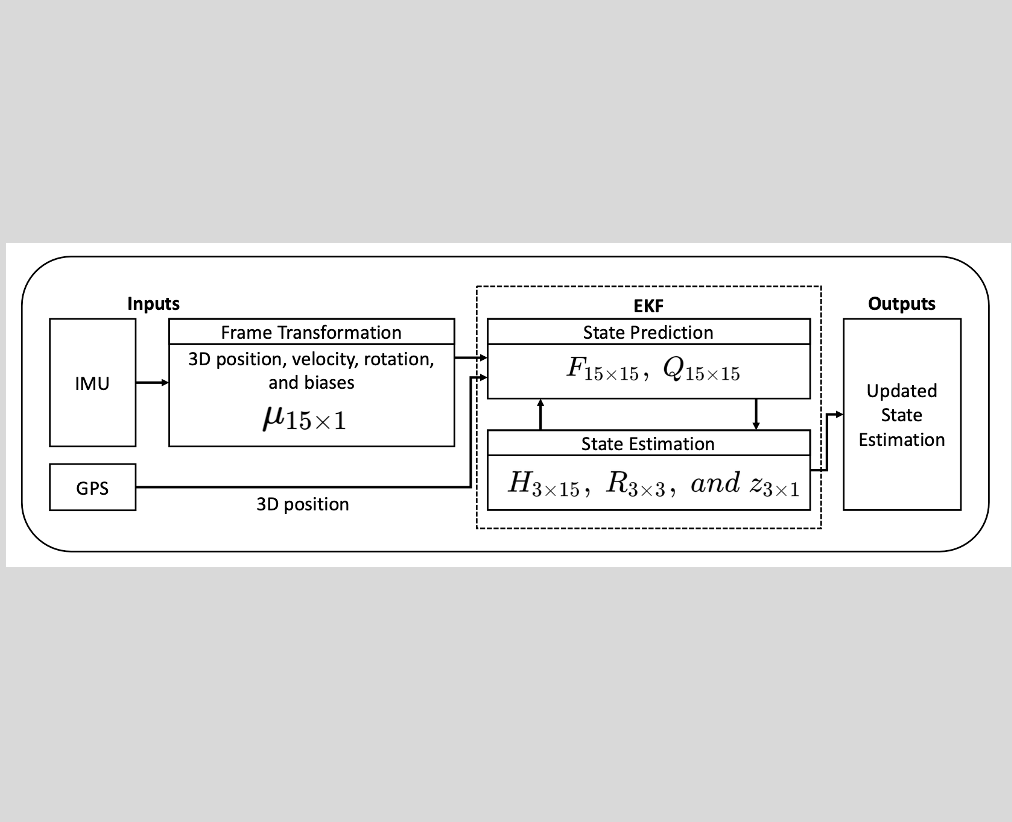
The framework for applying an extended Kalman filter was a bit more complicated, but includes the transforming the IMU measurement to a global frame and then applying state estimation methods.
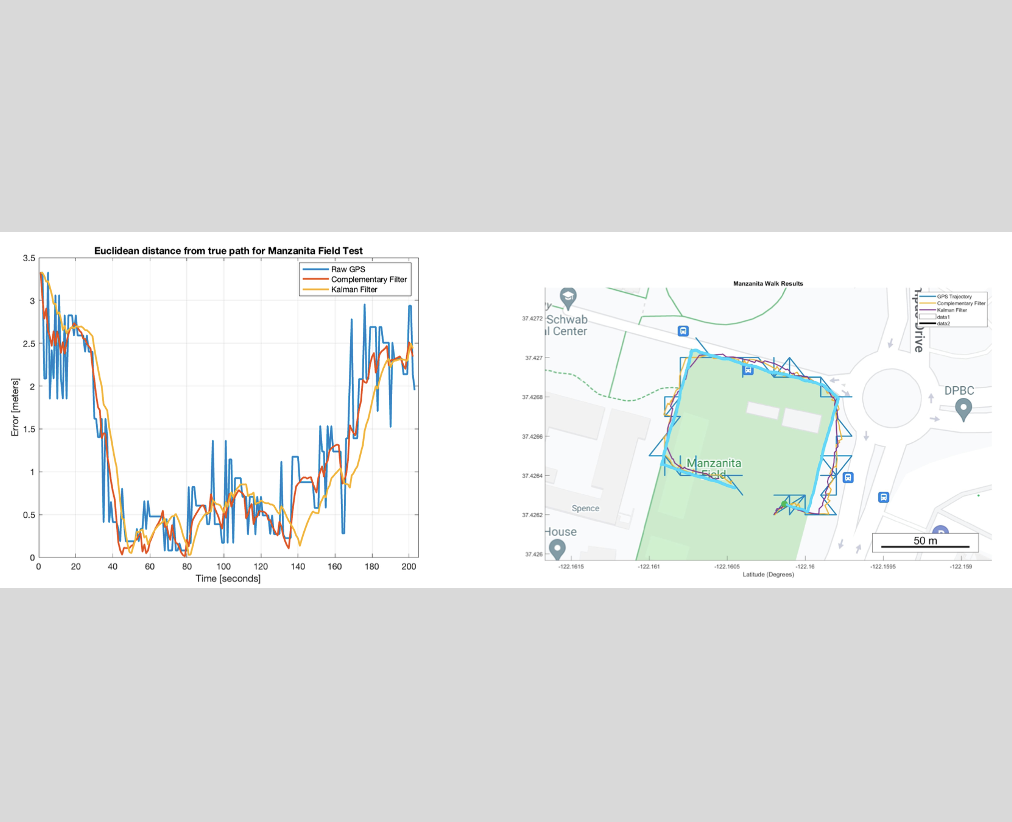
A data collection test of a pedestrian circling a field is shown below. The filtered methods outperform the predictions using GNSS measurements alone.